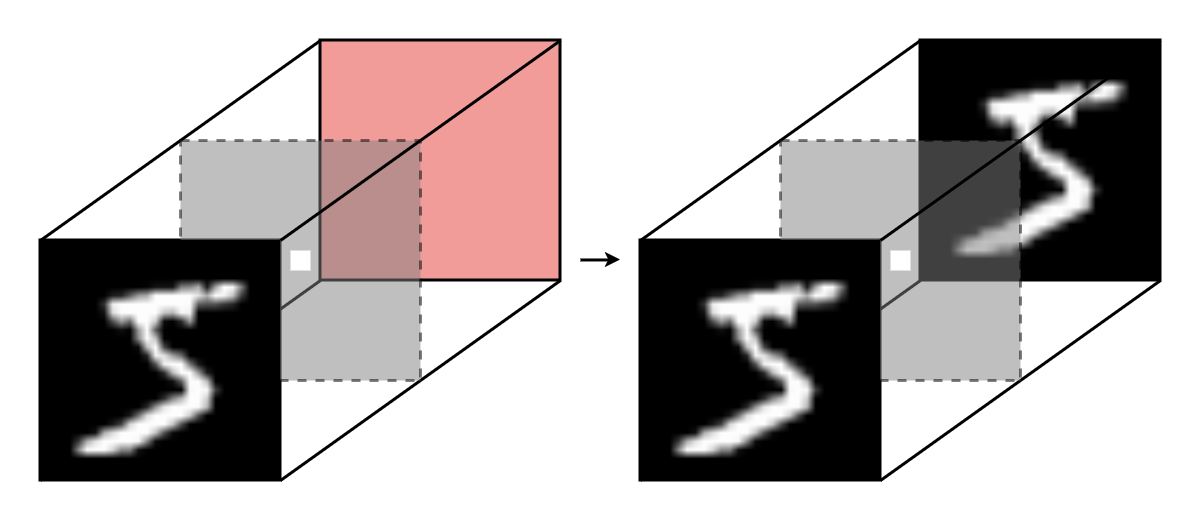
Self-autoencoding MNIST Digits  ¶
¶
Installation¶
You will need Python 3.11 or later, and a working JAX installation. For example, you can install JAX with:
In [ ]:
Copied!
%pip install -U "jax[cuda]"
%pip install -U "jax[cuda]"
Then, install CAX from PyPi:
In [ ]:
Copied!
%pip install -U "cax[examples]"
%pip install -U "cax[examples]"
Import¶
In [ ]:
Copied!
import jax
import jax.numpy as jnp
import mediapy
import optax
import torchvision
from flax import nnx
from tqdm.auto import tqdm
from cax.core import ComplexSystem, Input, State
from cax.core.perceive import ConvPerceive, grad_kernel, identity_kernel
from cax.core.update.nca_update import NCAUpdate
from cax.nn.pool import Pool
from cax.utils import clip_and_uint8
import jax
import jax.numpy as jnp
import mediapy
import optax
import torchvision
from flax import nnx
from tqdm.auto import tqdm
from cax.core import ComplexSystem, Input, State
from cax.core.perceive import ConvPerceive, grad_kernel, identity_kernel
from cax.core.update.nca_update import NCAUpdate
from cax.nn.pool import Pool
from cax.utils import clip_and_uint8
Configuration¶
In [ ]:
Copied!
seed = 0
channel_size = 16
spatial_dims = (28, 28, 42)
num_kernels = 4
hidden_size = 256
cell_dropout_rate = 0.5
num_steps = 96
pool_size = 1_024
batch_size = 8
learning_rate = 1e-3
key = jax.random.key(seed)
rngs = nnx.Rngs(seed)
seed = 0
channel_size = 16
spatial_dims = (28, 28, 42)
num_kernels = 4
hidden_size = 256
cell_dropout_rate = 0.5
num_steps = 96
pool_size = 1_024
batch_size = 8
learning_rate = 1e-3
key = jax.random.key(seed)
rngs = nnx.Rngs(seed)
Dataset¶
In [ ]:
Copied!
# Load MNIST dataset
ds_train = torchvision.datasets.MNIST(root="./data", train=True, download=True)
ds_test = torchvision.datasets.MNIST(root="./data", train=False, download=True)
# Convert to jax.Array
x_train = jnp.array([x.resize(spatial_dims[:2]) for x, _ in ds_train])[..., None] / 255
x_test = jnp.array([x.resize(spatial_dims[:2]) for x, _ in ds_test])[..., None] / 255
# Visualize
mediapy.show_images(x_train[:8], width=128, height=128)
# Load MNIST dataset
ds_train = torchvision.datasets.MNIST(root="./data", train=True, download=True)
ds_test = torchvision.datasets.MNIST(root="./data", train=False, download=True)
# Convert to jax.Array
x_train = jnp.array([x.resize(spatial_dims[:2]) for x, _ in ds_train])[..., None] / 255
x_test = jnp.array([x.resize(spatial_dims[:2]) for x, _ in ds_test])[..., None] / 255
# Visualize
mediapy.show_images(x_train[:8], width=128, height=128)
Instantiate system¶
In [ ]:
Copied!
class SelfAutoencodingNCA(ComplexSystem):
"""Self-Autoencoding Neural Cellular Automata class."""
def __init__(self, *, rngs: nnx.Rngs):
"""Initialize Self-Autoencoding NCA."""
self.perceive = ConvPerceive(
channel_size=channel_size,
perception_size=num_kernels * channel_size,
kernel_size=(3, 3, 3),
feature_group_count=channel_size,
rngs=rngs,
)
self.update = NCAUpdate(
channel_size=channel_size,
perception_size=num_kernels * channel_size,
hidden_layer_sizes=(hidden_size,),
cell_dropout_rate=cell_dropout_rate,
kernel_size=(3, 3, 3),
zeros_init=True,
rngs=rngs,
)
# Initialize kernel with sobel filters
kernel = jnp.concatenate([identity_kernel(ndim=3), grad_kernel(ndim=3)], axis=-1)
kernel = jnp.expand_dims(jnp.concatenate([kernel] * channel_size, axis=-1), axis=-2)
self.perceive.conv.kernel[...] = kernel
def _step(self, state: State, input: Input | None = None, *, sow: bool = False) -> State:
"""Perform a single step."""
# Extract x
x = state[..., 0, -1:]
# Step
perception = self.perceive(state)
next_state = self.update(state, perception, input)
# Mask
mid = tuple(size // 2 for size in spatial_dims)
center = next_state[..., *mid, :]
next_state = next_state.at[..., mid[-1], :].set(0.0) # Mask
next_state = next_state.at[..., *mid, :].set(center) # Except center cell
# Override
next_state = next_state.at[..., 0, -1:].set(x)
if sow:
self.sow(nnx.Intermediate, "state", next_state)
return next_state
@nnx.jit
def render(self, state):
"""Render state to RGB."""
gray = state[..., -1, -1:]
rgb = jnp.repeat(gray, 3, axis=-1)
# Clip values to valid range and convert to uint8
return clip_and_uint8(rgb)
class SelfAutoencodingNCA(ComplexSystem):
"""Self-Autoencoding Neural Cellular Automata class."""
def __init__(self, *, rngs: nnx.Rngs):
"""Initialize Self-Autoencoding NCA."""
self.perceive = ConvPerceive(
channel_size=channel_size,
perception_size=num_kernels * channel_size,
kernel_size=(3, 3, 3),
feature_group_count=channel_size,
rngs=rngs,
)
self.update = NCAUpdate(
channel_size=channel_size,
perception_size=num_kernels * channel_size,
hidden_layer_sizes=(hidden_size,),
cell_dropout_rate=cell_dropout_rate,
kernel_size=(3, 3, 3),
zeros_init=True,
rngs=rngs,
)
# Initialize kernel with sobel filters
kernel = jnp.concatenate([identity_kernel(ndim=3), grad_kernel(ndim=3)], axis=-1)
kernel = jnp.expand_dims(jnp.concatenate([kernel] * channel_size, axis=-1), axis=-2)
self.perceive.conv.kernel[...] = kernel
def _step(self, state: State, input: Input | None = None, *, sow: bool = False) -> State:
"""Perform a single step."""
# Extract x
x = state[..., 0, -1:]
# Step
perception = self.perceive(state)
next_state = self.update(state, perception, input)
# Mask
mid = tuple(size // 2 for size in spatial_dims)
center = next_state[..., *mid, :]
next_state = next_state.at[..., mid[-1], :].set(0.0) # Mask
next_state = next_state.at[..., *mid, :].set(center) # Except center cell
# Override
next_state = next_state.at[..., 0, -1:].set(x)
if sow:
self.sow(nnx.Intermediate, "state", next_state)
return next_state
@nnx.jit
def render(self, state):
"""Render state to RGB."""
gray = state[..., -1, -1:]
rgb = jnp.repeat(gray, 3, axis=-1)
# Clip values to valid range and convert to uint8
return clip_and_uint8(rgb)
In [ ]:
Copied!
cs = SelfAutoencodingNCA(rngs=rngs)
cs = SelfAutoencodingNCA(rngs=rngs)
In [ ]:
Copied!
params = nnx.state(cs, nnx.Param)
print("Number of params:", sum(x.size for x in jax.tree.leaves(params)))
params = nnx.state(cs, nnx.Param)
print("Number of params:", sum(x.size for x in jax.tree.leaves(params)))
Sample initial state¶
In [ ]:
Copied!
def sample_state(key):
"""Sample a state with a random image."""
# Init state
state = jnp.zeros(spatial_dims + (channel_size,))
# Sample random image
x_idx = jax.random.choice(key, x_train.shape[0])
x = x_train[x_idx]
# Set image in state
state = state.at[..., 0, -1:].set(x)
return state, x_idx
def sample_state(key):
"""Sample a state with a random image."""
# Init state
state = jnp.zeros(spatial_dims + (channel_size,))
# Sample random image
x_idx = jax.random.choice(key, x_train.shape[0])
x = x_train[x_idx]
# Set image in state
state = state.at[..., 0, -1:].set(x)
return state, x_idx
Train¶
Pool¶
In [ ]:
Copied!
key, subkey = jax.random.split(key)
keys = jax.random.split(subkey, pool_size)
state, x_idx = jax.vmap(sample_state)(keys)
pool = Pool.create({"state": state, "x_idx": x_idx})
key, subkey = jax.random.split(key)
keys = jax.random.split(subkey, pool_size)
state, x_idx = jax.vmap(sample_state)(keys)
pool = Pool.create({"state": state, "x_idx": x_idx})
Optimizer¶
In [ ]:
Copied!
lr_sched = optax.linear_schedule(
init_value=learning_rate, end_value=0.5 * learning_rate, transition_steps=2_000
)
optimizer = optax.chain(
optax.clip_by_global_norm(1.0),
optax.adam(learning_rate=lr_sched),
)
update_params = nnx.All(
nnx.Param,
# nnx.PathContains("update"),
)
optimizer = nnx.Optimizer(cs, optimizer, wrt=update_params)
lr_sched = optax.linear_schedule(
init_value=learning_rate, end_value=0.5 * learning_rate, transition_steps=2_000
)
optimizer = optax.chain(
optax.clip_by_global_norm(1.0),
optax.adam(learning_rate=lr_sched),
)
update_params = nnx.All(
nnx.Param,
# nnx.PathContains("update"),
)
optimizer = nnx.Optimizer(cs, optimizer, wrt=update_params)
Loss¶
In [ ]:
Copied!
def mse(state, x):
"""Mean Squared Error."""
return jnp.mean(jnp.square(state[..., :, -1:] - x[..., None, :]))
def mse(state, x):
"""Mean Squared Error."""
return jnp.mean(jnp.square(state[..., :, -1:] - x[..., None, :]))
In [ ]:
Copied!
@nnx.jit
def loss_fn(cs, state, x):
"""Loss function."""
state_axes = nnx.StateAxes({nnx.RngState: 0, nnx.Intermediate: 0, ...: None})
nnx.split_rngs(splits=batch_size)(
nnx.vmap(
lambda cs, state: cs(state, num_steps=num_steps, sow=True),
in_axes=(state_axes, 0),
)
)(cs, state)
# Get intermediate states
intermediates = nnx.pop(cs, nnx.Intermediate)
state = intermediates.state[0]
# Sample a random step
idx = jax.random.randint(key, (batch_size,), num_steps // 2, num_steps)
state = state[jnp.arange(batch_size), idx]
loss = mse(state, x)
return loss, state
@nnx.jit
def loss_fn(cs, state, x):
"""Loss function."""
state_axes = nnx.StateAxes({nnx.RngState: 0, nnx.Intermediate: 0, ...: None})
nnx.split_rngs(splits=batch_size)(
nnx.vmap(
lambda cs, state: cs(state, num_steps=num_steps, sow=True),
in_axes=(state_axes, 0),
)
)(cs, state)
# Get intermediate states
intermediates = nnx.pop(cs, nnx.Intermediate)
state = intermediates.state[0]
# Sample a random step
idx = jax.random.randint(key, (batch_size,), num_steps // 2, num_steps)
state = state[jnp.arange(batch_size), idx]
loss = mse(state, x)
return loss, state
Train step¶
In [ ]:
Copied!
@nnx.jit
def train_step(cs, optimizer, pool, key):
"""Train step."""
sample_key, sample_state_key = jax.random.split(key)
# Sample from pool
pool_idx, batch = pool.sample(sample_key, batch_size=batch_size)
current_state = batch["state"]
current_x_idx = batch["x_idx"]
current_x = x_train[current_x_idx]
# Sort by descending loss
sort_idx = jnp.argsort(jax.vmap(mse)(current_state, current_x), descending=True)
pool_idx = pool_idx[sort_idx]
current_state = current_state[sort_idx]
current_x_idx = current_x_idx[sort_idx]
# Sample a new state to replace the worst
new_state, new_x_idx = sample_state(sample_state_key)
current_state = current_state.at[0].set(new_state)
current_x_idx = current_x_idx.at[0].set(new_x_idx)
current_x = x_train[current_x_idx]
(loss, current_state), grad = nnx.value_and_grad(
loss_fn, has_aux=True, argnums=nnx.DiffState(0, update_params)
)(cs, current_state, current_x)
optimizer.update(cs, grad)
pool = pool.update(pool_idx, {"state": current_state, "x_idx": current_x_idx})
return loss, pool
@nnx.jit
def train_step(cs, optimizer, pool, key):
"""Train step."""
sample_key, sample_state_key = jax.random.split(key)
# Sample from pool
pool_idx, batch = pool.sample(sample_key, batch_size=batch_size)
current_state = batch["state"]
current_x_idx = batch["x_idx"]
current_x = x_train[current_x_idx]
# Sort by descending loss
sort_idx = jnp.argsort(jax.vmap(mse)(current_state, current_x), descending=True)
pool_idx = pool_idx[sort_idx]
current_state = current_state[sort_idx]
current_x_idx = current_x_idx[sort_idx]
# Sample a new state to replace the worst
new_state, new_x_idx = sample_state(sample_state_key)
current_state = current_state.at[0].set(new_state)
current_x_idx = current_x_idx.at[0].set(new_x_idx)
current_x = x_train[current_x_idx]
(loss, current_state), grad = nnx.value_and_grad(
loss_fn, has_aux=True, argnums=nnx.DiffState(0, update_params)
)(cs, current_state, current_x)
optimizer.update(cs, grad)
pool = pool.update(pool_idx, {"state": current_state, "x_idx": current_x_idx})
return loss, pool
Main loop¶
In [ ]:
Copied!
num_train_steps = 2 * 8_192
print_interval = 128
pbar = tqdm(range(num_train_steps), desc="Training", unit="train_step")
losses = []
for i in pbar:
key, subkey = jax.random.split(key)
loss, pool = train_step(cs, optimizer, pool, subkey)
losses.append(loss)
if i % print_interval == 0 or i == num_train_steps - 1:
avg_loss = sum(losses[-print_interval:]) / len(losses[-print_interval:])
pbar.set_postfix({"Average Loss": f"{avg_loss:.3e}"})
num_train_steps = 2 * 8_192
print_interval = 128
pbar = tqdm(range(num_train_steps), desc="Training", unit="train_step")
losses = []
for i in pbar:
key, subkey = jax.random.split(key)
loss, pool = train_step(cs, optimizer, pool, subkey)
losses.append(loss)
if i % print_interval == 0 or i == num_train_steps - 1:
avg_loss = sum(losses[-print_interval:]) / len(losses[-print_interval:])
pbar.set_postfix({"Average Loss": f"{avg_loss:.3e}"})
Run¶
In [ ]:
Copied!
num_examples = 8
key, subkey = jax.random.split(key)
keys = jax.random.split(subkey, num_examples)
state_init, x_idx = jax.vmap(sample_state)(keys)
state_axes = nnx.StateAxes({nnx.RngState: 0, nnx.Intermediate: 0, ...: None})
state_final = nnx.split_rngs(splits=num_examples)(
nnx.vmap(
lambda cs, state: cs(state, num_steps=2 * num_steps, sow=True),
in_axes=(state_axes, 0),
)
)(cs, state_init)
num_examples = 8
key, subkey = jax.random.split(key)
keys = jax.random.split(subkey, num_examples)
state_init, x_idx = jax.vmap(sample_state)(keys)
state_axes = nnx.StateAxes({nnx.RngState: 0, nnx.Intermediate: 0, ...: None})
state_final = nnx.split_rngs(splits=num_examples)(
nnx.vmap(
lambda cs, state: cs(state, num_steps=2 * num_steps, sow=True),
in_axes=(state_axes, 0),
)
)(cs, state_init)
Visualize¶
In [ ]:
Copied!
intermediates = nnx.pop(cs, nnx.Intermediate)
states = intermediates.state[0]
intermediates = nnx.pop(cs, nnx.Intermediate)
states = intermediates.state[0]
In [ ]:
Copied!
states = jnp.concatenate([state_init[:, None], states], axis=1)
frames = nnx.vmap(
lambda cs, state: cs.render(state),
in_axes=(None, 0),
)(cs, states)
mediapy.show_images(x_train[x_idx], width=128, height=128)
mediapy.show_videos(frames, width=128, height=128, codec="gif")
states = jnp.concatenate([state_init[:, None], states], axis=1)
frames = nnx.vmap(
lambda cs, state: cs.render(state),
in_axes=(None, 0),
)(cs, states)
mediapy.show_images(x_train[x_idx], width=128, height=128)
mediapy.show_videos(frames, width=128, height=128, codec="gif")